Robot Programmer Akademisi
3DEXPERIENCE Works Manufacturing portföyündeki çözümlerden biri olan Robot Programmer ile endüstriyel robot iş hücrelerini şirket içinde ve bütçeniz dahilinde nasıl oluşturabileceğinizi, simüle edebileceğinizi, doğrulayabileceğinizi ve programlayabileceğinizi öğrenin.
Aşağıda yer alan eğitimlere hemen başlayın!
İş hücresi, fabrika yerleşimi, cihaz yapımı ve kinematiği, robot öğretimi ve simülasyonu, doğrulama ve çevrimdışı programlama gibi konularda sizi yönlendirecek derslerde SOLIDWORKS® Robot Teknolojileri Uzmanı Tony Karew'e katılın.
- İlk adım: Eğitimler için model dosyalarını içeren zip dosyasını indirin.
- Ders 1: Robot Programmer'a Giriş
- Ders 2: Kinematik Mekanizma Oluşturma
- Ders 3A: Malzeme Taşıma Robotu Öğretimi
- Ders 3B: Ark Kaynaklayıcı Robot Öğretimi
- Ders 4: Simülasyon ve Doğrulama
- Ders 5: Çevrimdışı Programlama ve Kalibrasyon
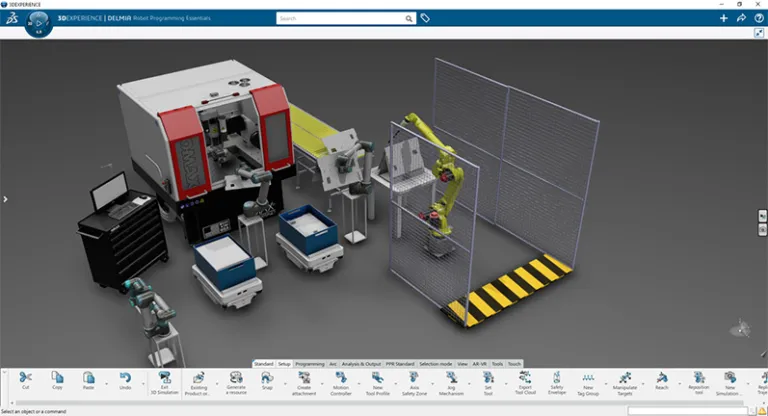
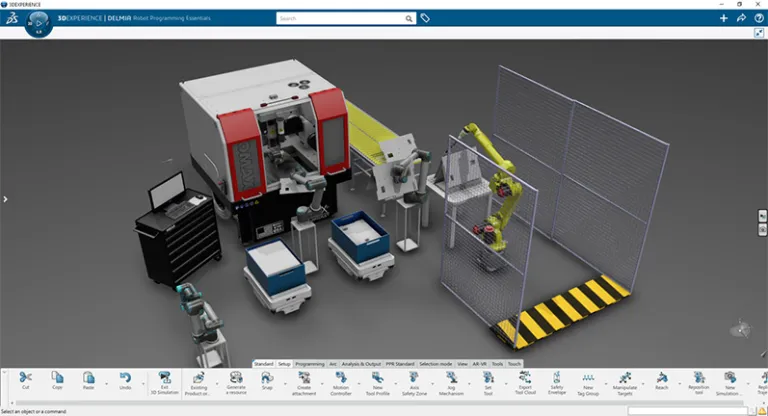
Robot Programmer'a Giriş
3DEXPERIENCE® Works portföyündeki Robot Programmer rolünü nasıl kullanacağınızı öğrenmek için bu videoyu izleyin. Bu video size kurulum ve bazı ortam ayarlarında yol gösterecek.
3D verilerin 3DEXPERIENCE platformuna nasıl yükleneceğini, iş hücresi yerleşimini gerçekleştirmeye başlamak için Yer İşaretlerini nasıl kullanacağınızı ve Robot Kütüphanesinden robotları nasıl içe aktaracağınızı öğrenin.
Kinematik Mekanizma Oluşturma
İleri kinematik, ev konumları, hız ve ivme parametrelerinin yanı sıra bir robotun monte edileceği bağlantı noktaları ve Toplam Merkez Noktası'nın (TCP) nasıl ekleneceğini öğrenin. Tüm bunların yanında Tony, PowerBy ve File Open kullanarak 3DEXPERIENCE platformunda 3D SOLIDWORKS verilerini içe aktarıp kullanmanın farklı yöntemlerini de anlatıyor.
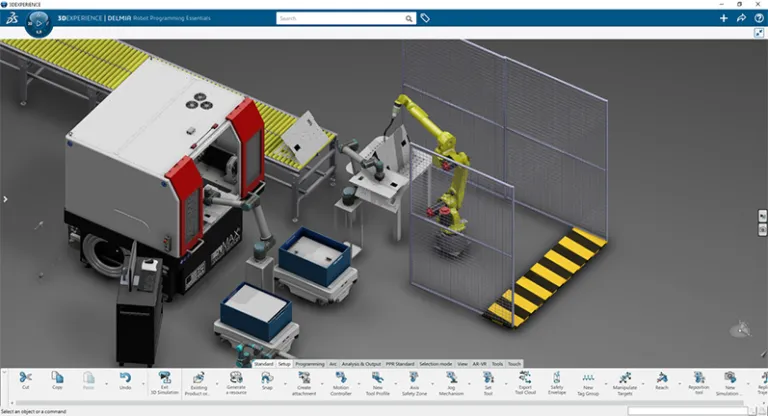
Malzeme Taşıma Robotu Öğretimi
Bu derste Tony, kol ucu takımını monte etmek için Set Tool'u nasıl kullanabileceğinizi anlatıyor. Aynı zamanda bir Robot Görevi oluşturmayı ve tutucuyu bir Yardımcı Eksen olarak nasıl programlayabileceğinizi de öğreneceksiniz. Ayrıca Teach arayüzünü nasıl kullanacağınızı ve Tutma ile Bırakma komutlarını nasıl kullanacağınızı da öğreneceksiniz.
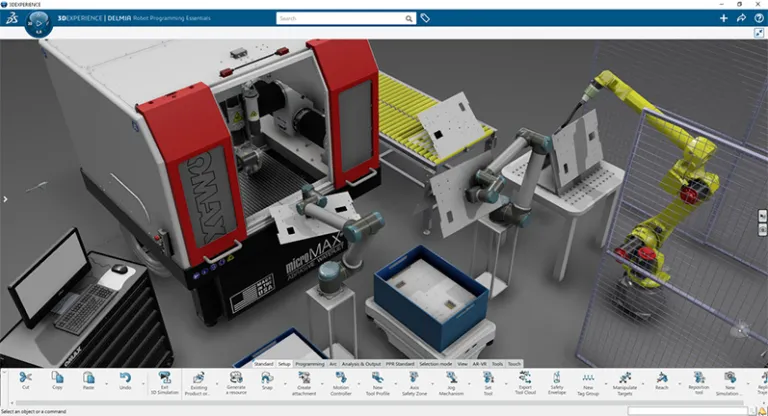

Ark Kaynaklayıcı Robot Öğretimi
Bu videoda Tony, Simülasyon Durumlarının önemini açıklıyor. Ayrıca Set Tool komutunu kullanarak şalomayı nasıl monte edeceğinizi ve Kaynak Profilleri hakkında bilgi edineceksiniz. Tüm bunların yanında Robot Programmer'ın Teach arayüzünün bazı özelliklerini de öğreneceksiniz.
Simülasyon ve Doğrulama
Dördüncü derste yalnızca bir Görevi nasıl çalıştıracağınızı değil aynı zamanda birden fazla görevi nasıl sıralayacağınızı da öğreneceksiniz. Ayrıca simülasyonu nasıl yapacağınızı, ulaşılabilirliği ve robot yerleşimini nasıl hesaplayacağınızı da öğreneceksiniz.

Çevrimdışı Programlama ve Kalibrasyon
Son dersimizde Tony, çevrimdışı programlama (OFP) ve kalibrasyona genel bir bakış sunuyor. Ayrıca çeviricilerin nasıl yükleneceğini ve nasıl çalıştıklarını da öğreneceksiniz. Tony sanal ve gerçek dünyaların nasıl kalibre edileceğini de ele alıyor.
3DEXPERIENCE Works Üretimi Otomatikleştirmenize Yardımcı Oluyor
3DEXPERIENCE Works ile bir sonraki adıma geçmeye hazır mısınız?
Bir bayiden mevcut SOLIDWORKS yatırımınıza 3DEXPERIENCE Works eklemenin avantajları ve maliyeti hakkında bilgi edinin.
