Robot Programmer 아카데미
3DEXPERIENCE Works Manufacturing 포트폴리오의 솔루션인 Robot Programmer를 통해 산업용 로봇을 사내에서 예산에 맞게 구현, 시뮬레이션, 검증 및 프로그래밍하는 방법을 알아보십시오.
지금 바로 아래의 튜토리얼을 시작해 보세요!
SOLIDWORKS® Robotics Expert인 Tony Karew가 워크셀 및 플랜트 레이아웃부터 장치 구축 및 기구학, 로봇 교육 및 시뮬레이션, 검증 및 오프라인 프로그래밍까지 교육 과정을 안내해 드립니다.
- 첫 번째 단계: 튜토리얼을 위한 모델 파일이 들어 있는 zip 폴더를 다운로드합니다.
- 1장: Robot Programmer 시작하기
- 2장: 기구 메커니즘 만들기
- 3A장: 자재 처리 로봇 교육하기
- 3B장: 원호 용접 로봇 교육하기
- 4장: 시뮬레이션 및 검증
- 5장: 프로그래밍 및 보정
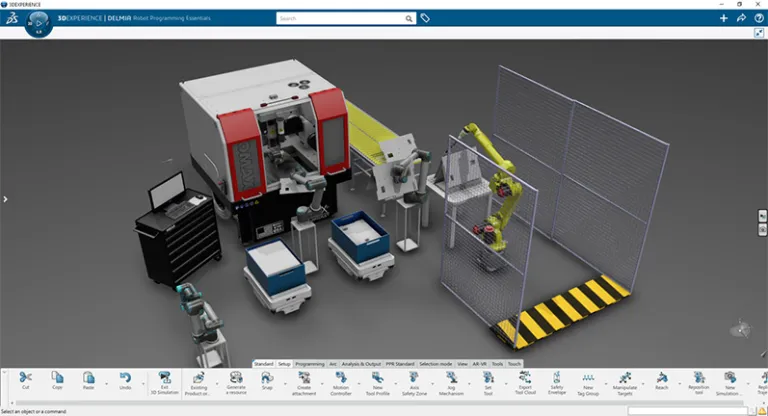
Robot Programmer 시작하기
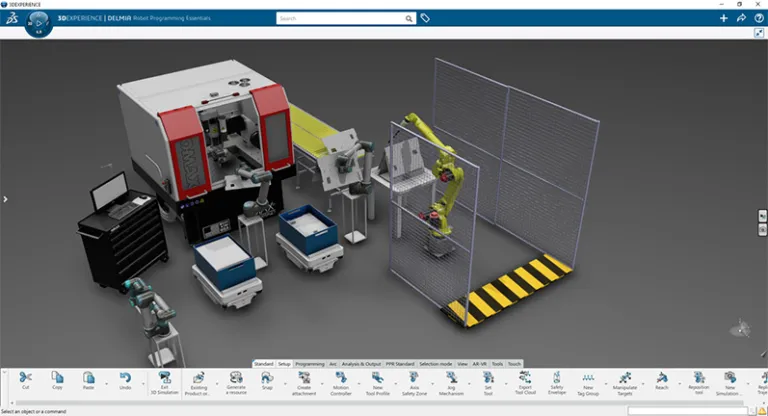
이 비디오를 시청하면서 3DEXPERIENCE® Works 포트폴리오의 Robot Programmer Role을 가동하고 실행하는 방법을 알아보십시오. 이 비디오는 설치와 몇 가지 환경 설정에 대해 안내합니다.
3D 데이터를 3DEXPERIENCE 플랫폼에 로드하는 방법, 북마크를 사용하여 워크셀 레이아웃을 수행하는 방법, 로봇 라이브러리로부터 로봇을 가져오는 방법을 알아보십시오.
기구 메커니즘 만들기
정기구학, 정위치, 속도, 가속 파라미터는 물론 로봇의 마운트 포트와 TCP(Total Center Point)를 추가하는 방법을 알아보십시오. PowerBy 및 파일 열기를 사용하여 3DEXPERIENCE 플랫폼에서 3D SOLIDWORKS 데이터를 가져오고 사용하는 다양한 방법에 대해서도 Tony가 설명합니다.
자재 처리 로봇 교육하기
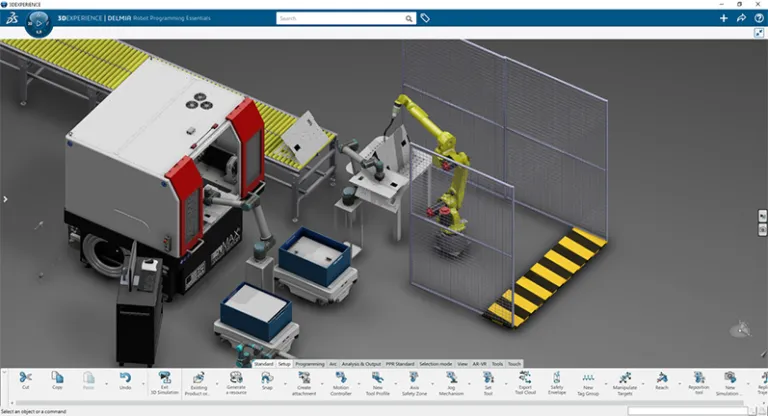
이 장에서 Tony는 도구 설정을 사용하여 암 툴링의 끝을 장착하는 방법을 보여줍니다. 로봇 작업을 만드는 방법과 그리퍼를 보조축으로 프로그래밍하는 방법에 대해서도 배웁니다. 교육 인터페이스를 작동하고 잡기 및 놓기 명령을 사용하는 방법에 대해서도 배웁니다.

원호 용접 로봇 교육하기
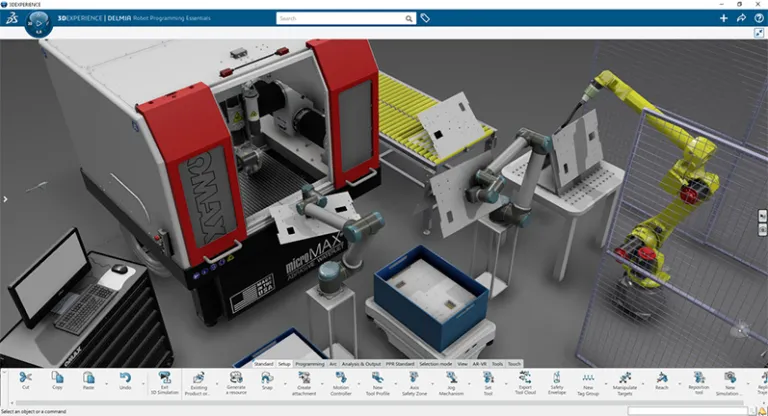
이 비디오에서 Tony는 시뮬레이션 상태의 중요성을 설명합니다. 도구 설정 명령을 사용하여 토치를 장착하는 방법과 용접 프로파일에 대해서도 배웁니다. Robot Programmer 교육 인터페이스의 몇 가지 기능에 대해서도 배웁니다.
시뮬레이션 및 검증
이 네 번째 장에서는 작업을 실행하는 방법뿐만 아니라 여러 작업의 순서를 지정하는 방법에 대해서도 배웁니다. 시뮬레이션을 실행하고 도달 가능성 및 로봇 배치를 계산하는 방법에 대해서도 배웁니다.

프로그래밍 및 보정
이 마지막 장에서 Tony는 오프라인 프로그래밍(OFP) 및 보정을 개략적으로 설명합니다. 변환기를 로드하는 방법과 변환기의 몇 가지 작동 방법에 대해서도 배웁니다. Tony는 가상 및 현실 세계를 보정하는 방법에 대해서도 설명합니다.
제조 프로세스 자동화를 위한 3DEXPERIENCE Works
3DEXPERIENCE Works와 함께 성장할 준비가 되셨습니까?
SOLIDWORKS에 3DEXPERIENCE Works를 추가할 때의 이점과 비용에 대해 리셀러에게 문의하십시오.
