Robot Programmer Academy
Découvrez comment créer, simuler, valider et programmer des cellules de travail de robots industriels en interne et avec le budget imparti grâce à Robot Programmer, une solution du portefeuille 3DEXPERIENCE Works pour la fabrication.
Commencez les tutoriels ci-dessous dès aujourd'hui !
Rejoignez Tony Karew, expert en robotique SOLIDWORKS®, qui vous guidera à travers les leçons pour vous présenter aussi bien la configuration de la cellule de travail et de l'usine que la construction et la cinématique des appareils, l'apprentissage et la simulation robotiques, ainsi que la validation et la programmation hors ligne.
- Première étape : Téléchargez le dossier zip contenant les fichiers modèles pour les tutoriels.
- Leçon 1 : Prise en main de Robot Programmer
- Leçon 2 : Construction d'un mécanisme cinématique
- Leçon 3A : Apprentissage d'un robot de manutention des matériaux
- Leçon 3B : Apprentissage d'un robot de soudage à l'arc
- Leçon 4 : Simuler et valider
- Leçon 5 : Programmation et étalonnage hors ligne
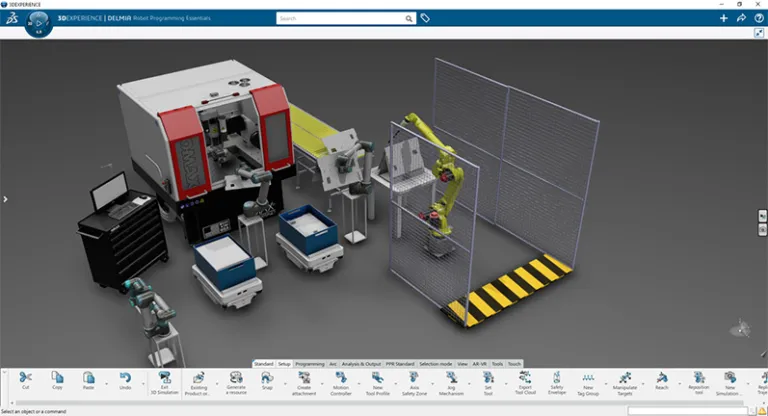
Prise en main de Robot Programmer
Regardez cette vidéo pour apprendre à utiliser le rôle Robot Programmer dans le portefeuille 3DEXPERIENCE® Works. La vidéo vous guide tout au long de l'installation et de certains paramètres de l'environnement.
Regardez cette vidéo et découvrez comment charger des données 3D sur la plate-forme 3DEXPERIENCE, utiliser les signets pour agencer la cellule de travail et importer des robots depuis la bibliothèque de robots.
Construction d'un mécanisme cinématique
Regardez cette vidéo pour apprendre à intégrer la cinématique directe, les positions initiales, les paramètres de vitesse et d'accélération, ainsi que les ports à monter et un point central total (TCP) d'un robot. Tony explique également les différentes méthodes d'importation et d'utilisation des données 3D de SOLIDWORKS sur la plate-forme 3DEXPERIENCE à l'aide de PowerBy et de Fichier/Ouvrir.
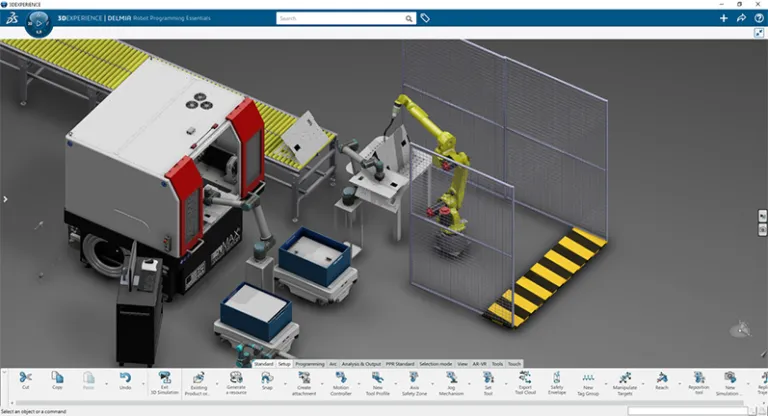
Apprentissage d'un robot de manutention des matériaux
Dans cette leçon, Tony vous montre comment utiliser l'outil de définition pour monter l'outillage robotique. Vous apprendrez également à créer une tâche de robot et à programmer la pince en tant qu'axe auxiliaire. En outre, vous apprendrez à vous servir de l'interface d'apprentissage et à utiliser les commandes Saisir et Relâcher.
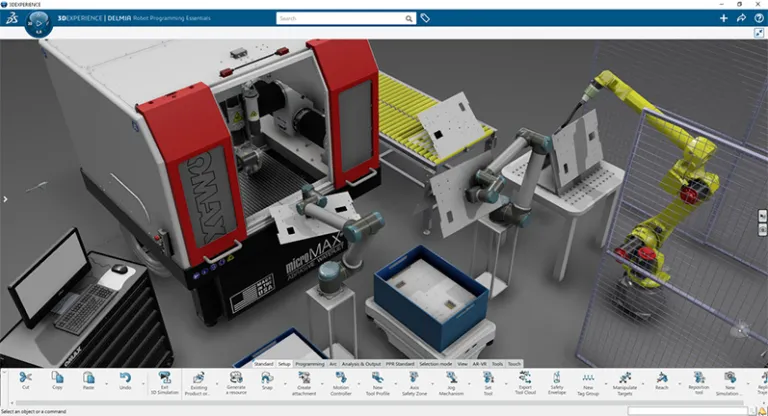

Apprentissage d'un robot de soudage à l'arc
Dans cette vidéo, Tony explique l'importance des états de la simulation. Vous apprendrez également à monter la torche à l'aide de la commande Outil de définition et vous découvrirez les profils de soudure. En outre, vous découvrirez certaines fonctionnalités de l'interface d'apprentissage de Robot Programmer.
Simuler et valider
Dans cette quatrième leçon, vous apprendrez non seulement à exécuter une tâche, mais aussi à séquencer plusieurs tâches. Vous apprendrez également à exécuter la simulation et à calculer l'accessibilité et le positionnement du robot.

Programmation et étalonnage hors ligne
Dans cette dernière leçon, Tony vous donne un aperçu de la programmation hors ligne (OFP) et de l'étalonnage hors ligne. Vous apprendrez également à charger les convertisseurs et vous en saurez plus sur leur fonctionnement. De plus, Tony vous explique comment étalonner les mondes virtuel et réel.
3DEXPERIENCE Works vous aide à automatiser la fabrication
Prêt à passer à l'étape suivante avec 3DEXPERIENCE Works ?
Renseignez-vous auprès d'un revendeur sur les avantages et les coûts liés à l'ajout de 3DEXPERIENCE Works à votre investissement SOLIDWORKS actuel.
