Academia de Robot Programmer
Descubra cómo puede crear, simular, validar y programar células de trabajo robóticas industriales en sus instalaciones y sin salirse del presupuesto con Robot Programmer, una solución de la cartera de fabricación de 3DEXPERIENCE Works.
¡Comience hoy mismo los tutoriales que aparecen a continuación!
Únase a Tony Karew, experto en robótica de SOLIDWORKS®, que le guiará a través de las lecciones que le llevarán desde el diseño de células de trabajo y plantas, la construcción de dispositivos y la cinemática, la enseñanza y la simulación robóticas, hasta la validación y también la programación sin conexión.
- Primer paso: Descargar la carpeta zip con los archivos de modelo para los tutoriales.
- Lección 1: Introducción a Robot Programmer
- Lección 2: Creación de un mecanismo cinemático
- Lección 3A: Enseñanza de un robot de manipulación de materiales
- Lección 3B: Enseñanza de un robot de soldadura por arco
- Lección 4: Simulación y validación
- Lección 5: Programación y calibración sin conexión
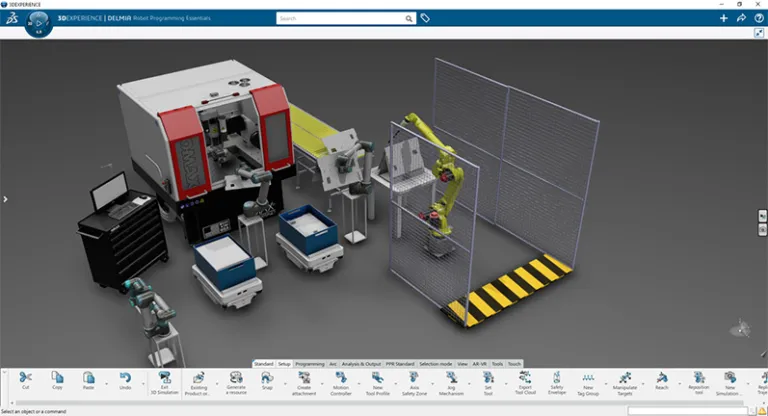
Introducción a Robot Programmer
Vea este vídeo para descubrir cómo ponerse en marcha con la función Robot Programmer de la cartera de 3DEXPERIENCE® Works. El vídeo le guía a través de la instalación y algunos de los ajustes del entorno.
Vea el vídeo para aprender a cargar datos 3D en la plataforma 3DEXPERIENCE, utilizar los marcadores para comenzar a realizar el diseño de la célula de trabajo e importar robots desde la biblioteca de robots.
Creación de un mecanismo cinemático
Vea este vídeo para aprender a agregar cinemática avanzada, posiciones de inicio, velocidades y parámetros de aceleración, así como puertos para ensamblaje y un punto central total (TCP) de un robot. Tony también explica los diferentes métodos para importar y utilizar datos 3D de SOLIDWORKS en la plataforma 3DEXPERIENCE mediante PowerBy y Archivo abierto.
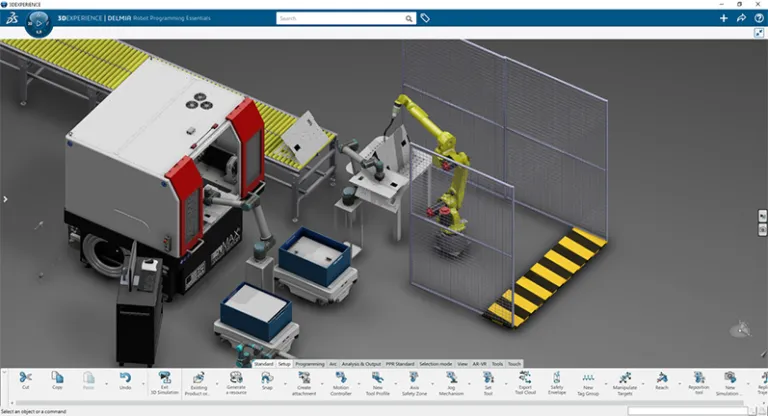
Enseñanza de un robot de manipulación de materiales
En esta lección, Tony le muestra cómo se utiliza la opción Configurar herramienta para ensamblar el extremo de las herramientas de brazos. También aprenderá a crear una tarea de robot y a programar el dispositivo de agarre como un eje auxiliar. También aprenderá a operar la interfaz Enseñar y a utilizar los comandos Capturar y Soltar.
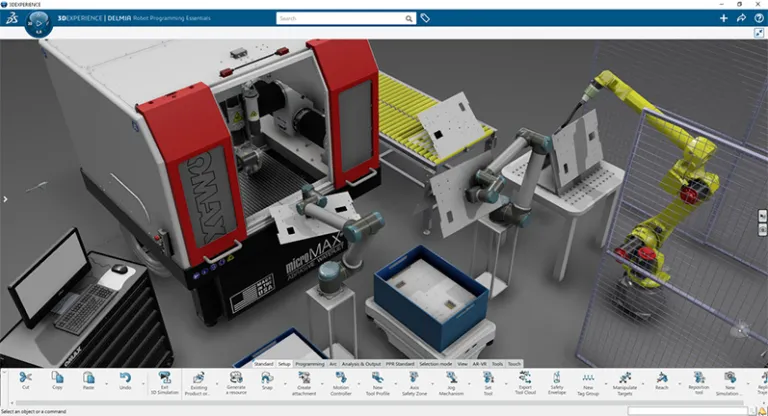

Enseñanza de un robot de soldadura por arco
En este vídeo, Tony explicará la importancia de los estados de simulación. También aprenderá a ensamblar la lanza de soldadura con el comando Configurar herramienta y obtendrá información sobre los perfiles de soldadura. También descubrirá algunas de las funcionalidades de la interfaz Enseñar de Robot Programmer.
Simulación y validación
En esta cuarta lección, no solo aprenderá a ejecutar una tarea, sino también cómo secuenciar varias tareas. También aprenderá a ejecutar la simulación y a calcular el alcance y la colocación de robots.

Programación y calibración sin conexión
En esta última lección, Tony proporciona una descripción general de la calibración y programación sin conexión (OFP). También aprenderá a cargar a los traductores y un poco sobre cómo operan. Tony también describe cómo calibrar el mundo virtual y el real.
3DEXPERIENCE Works le ayuda a automatizar la fabricación
¿Listo para dar el siguiente paso con 3DEXPERIENCE Works?
Pregunte a un distribuidor acerca de los beneficios y costes de agregar 3DEXPERIENCE Works a su inversión actual de SOLIDWORKS.
